
OFFSET
1,2
COMMENTS
A matchstick is a copy of a unit length line segment.
First, we place a matchstick in the vertical direction, anywhere in the plane.
Let us call this single matchstick, and hereafter each evolved configuration of matchsticks in the plane, the "figure". At every stage we add one further matchstick to the figure in the following manner:
We turn the figure 90 degrees clockwise. Then, always in a vertical direction, we place the bottom tip of the new matchstick in contact with the topmost part of the leftmost part of the figure.
Turning the newly obtained figure 90 degrees clockwise at every stage, we proceed with adding the new matchsticks in the same way.
Other than in the case of the first placed matchstick, three possible forms of joint will show at every placing:
The new matchstick
(a) is placed to another one in line with it.
(b) is placed to another one at right angle to it.
(c) is placed to two matchsticks, in line with one and at right angle to the other.
By numbering these types of contacts 1, 2 and 3, we write them down as this sequence. We chose 0 for the first placed matchstick that formed no initial joint.
This peculiar spiral has groups of "thorns" on its three arms. Their numbers appear to be the powers of 2 in their groups. The three arms and the cyclical four right angle turns during the generating process results in an interesting irregularity that may be worth analyzing. Generally, some binary nature is apparent.
For purposes of reference, the arms shall be named "A", "B", and "C" after the first, second and third placed matchsticks from which they stem.
While the sequence describes the joint types at the instances of the placements of the matchsticks, some type 2 joints may turn type 3 after rotation of the figure when the new placement falls there. Thus, the final joint types on the arms are not strictly the same as the terms of the sequence. This is to be borne in mind when investigating, counting, and comparing these final joint types laying on the individual arms of the spiral.
With these final joint types, the spiral may also be precisely described: type 1 is always a line, type 2 is always a corner, and type 3 is the single origin and the inward growing thorns.
Inherent to this spiral is some complexity whereby a term of the sequence does not tell us directly on which arm its indicated joint lays. Exploring the sequential recurrences of the arms corresponding to the terms can be one step towards understanding the properties of this spiral and the sequence itself.
LINKS
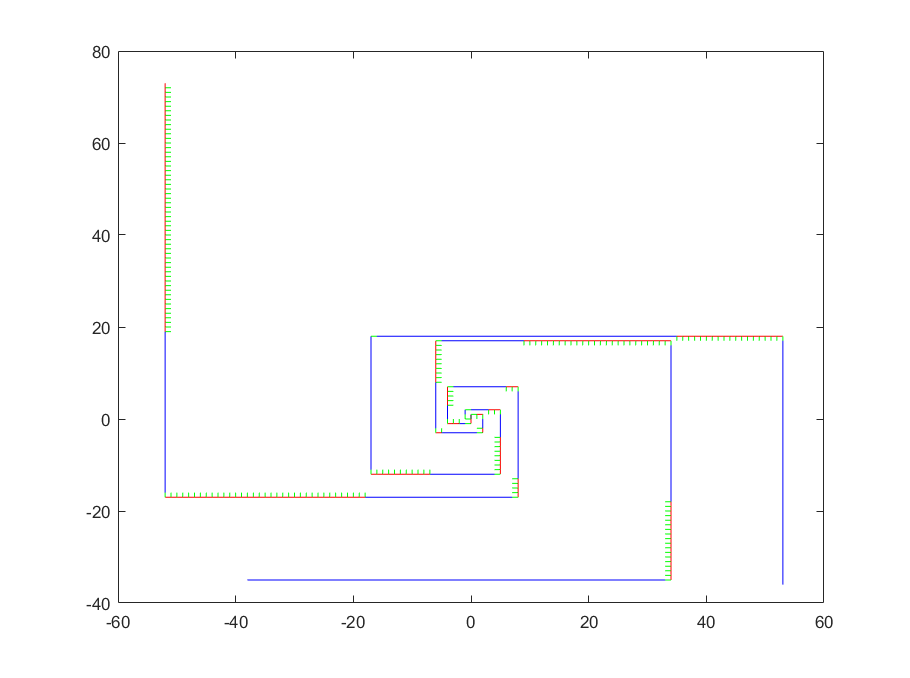
Thomas Scheuerle, The matchstick spiral for n=1000. Matchsticks are colored black, blue, green or red if the corresponding values of the sequence are 0, 1, 2 or 3.
{kind=link}
{kind=link}
FORMULA
a(789+2*n) = 3 and a(790+2*n) = 2, because this sequence becomes periodic. If the periodic case is reached only two arms of the spiral will extend without further bending. - Thomas Scheuerle, Sep 13 2022
EXAMPLE
The evolution of the spiral at the initial stages.
After the first placed matchstick no joint is formed yet, so the first term is 0:
.
|
.
The figure turned 90 degrees clockwise and the second matchstick placed, vertically again, to make a type 2 joint:
.
|_
.
The figure turned again, and the third matchstick makes a type 3 joint:
.
|_
|
.
Turned clockwise once more, and as always, the place of the bottom tip of the next matchstick is the topmost part of the leftmost part of the figure. The joint type is 2:
.
|_ _
|
.
And so on:
. _
|_|
|
.
The figure, here as the now discernible three-armed thorny spiral, after 68 matchsticks placed:
.
_ _ _ _ _Arm "C"
|_
|_
|_
|_
| _ _ _ _ _ _
| | _ _ | | |
| |_| | | |
| |_|_|_ _| | |
| _| |
|_|_ _ _ _ _ _ _| |
Arm "A" _|
_|
_|
|Arm "B"
.
For purposes of analysis, and indeed for a precise numerical description of the spiral too, the final joint types laying on the individual arms can also be listed. The first joint, that is the common origin, is type 3.
Arm "A": 3, 2, 3, 2, 1, 1, 3, 2, 1, 1, 1, 1, 1, 1, 3, 2, 1, 1, ...
Arm "B": 3, 2, 1, 2, 1, 1, 1, 3, 3, 2, 1, 1, 1, 1, 1, 3, 3, 3, ...
Arm "C": 3, 2, 1, 3, 3, 2, 1, 1, 1, 3, 3, 3, 3, 2, 1, 1, 1, 1, ...
PROG
(MATLAB)
function a = A355077( max_n )
a = 0; x = [0 0]; y = [0 1];
for n = 2:max_n
[x, y] = rotate(x, y);
[a(n), x, y] = addstick(x, y);
end
plot(x', y');
end
function [x, y] = rotate(x, y)
xx = x;
x = y;
y = -xx;
end
function [t, x, y] = addstick(x, y)
mx = min(min(x, [], 1));
jx = find(x == mx);
my = max(max(y(jx), [], 1));
jy = find(y == my);
ind = intersect(jx, jy);
d = size(x);
xn = x(ind(1)); yn = y(ind(1));
x = [x; xn xn]; y = [y; yn yn+1];
if length(ind) == 2
t = 3;
else
[r, c] = ind2sub(d, ind(1));
if x(r, 1) ~= x(r, 2);
t = 2;
else
t = 1;
end
end
end % Thomas Scheuerle, Sep 12 2022
CROSSREFS
KEYWORD
nonn
AUTHOR
Tamas Sandor Nagy, Sep 12 2022
STATUS
approved